











システム工学は、地図のない霧のなかを歩くような感覚になることが多い。多層のエレベーターシステムのような重要なインフラ構成要素を設計するという課題に直面したとき、そのリスクは非常に高い。論理やインターフェース定義のわずかな見落としは、高額な遅延や、さらに悪いことに安全上の危険を引き起こす可能性がある。この記事では、若手エンジニアがシステムモデリング言語(SysML)を活用して複雑なエレベータプロジェクトを構造化した実践的なプロセスを紹介する。単に図を描くことではなく、要件、構造、挙動を統合した一貫性のある動的な文書を作成することが目的であった。
独自のソフトウェアの制限を避け、言語の基本的な機能に注目することで、この事例研究は、標準的なSysML構成要素が実世界の工学的課題をどのように解決するかを示している。モデリングプロセスを段階的に説明し、使用された特定の図の種類、確立されたデータフロー、開発フェーズで克服された課題を検討する。
📋 プロジェクトの文脈と範囲
このプロジェクトは、中層の商業ビル向けの油圧式エレベーターシステムの設計を対象としていた。システムは特定の乗客負荷を処理し、ドア閉鎖の時間制限を厳密に守り、ビル管理システムと統合する必要があった。範囲は広く、機械的部品、電気制御、ソフトウェア論理の間での調整が求められた。
構造化されたモデリングアプローチがなければ、要件はしばしば孤立してしまう。モーターの開発に従事するエンジニアは、ドアセンサーのチームが定義した制約を見逃す可能性がある。SysMLは、こうしたギャップを埋める統一されたフレームワークを提供する。若手エンジニアは、システムの境界を定義し、主要なステークホルダーを特定することから着手した。
🎯 システムの主要な目標
- すべての運用状態において乗客の安全を確保する。
- ピーク時間帯の交通量に応じてエネルギー消費を最適化する。
- ボタン押下からドア開閉まで2秒未満の応答時間を維持する。
- 高レベルの要件から物理的部品まで、明確なトレーサビリティを提供する。
これらの目標は、要件モデルの基盤となった。各目標は、設計プロセスの後段階で検証可能な具体的な記述に分解された。
🔗 フェーズ1:要件工学
あらゆるシステム工学の取り組みにおいて最初のステップは、システムが何をしなければならないかを捉えることである。SysMLでは、主に要件図と要件要素によってこの作業が行われる。このフェーズは非常に重要であり、モデルの残りの部分のルールを定めるからである。要件が曖昧であれば、構造的・行動的モデルは方向性を失う。
エンジニアは要件に対して階層構造を作成した。上位レベルの要件は、サブ要件に分解された。この分解により、システムの義務を細かく把握できるようになった。
📝 要件の分解
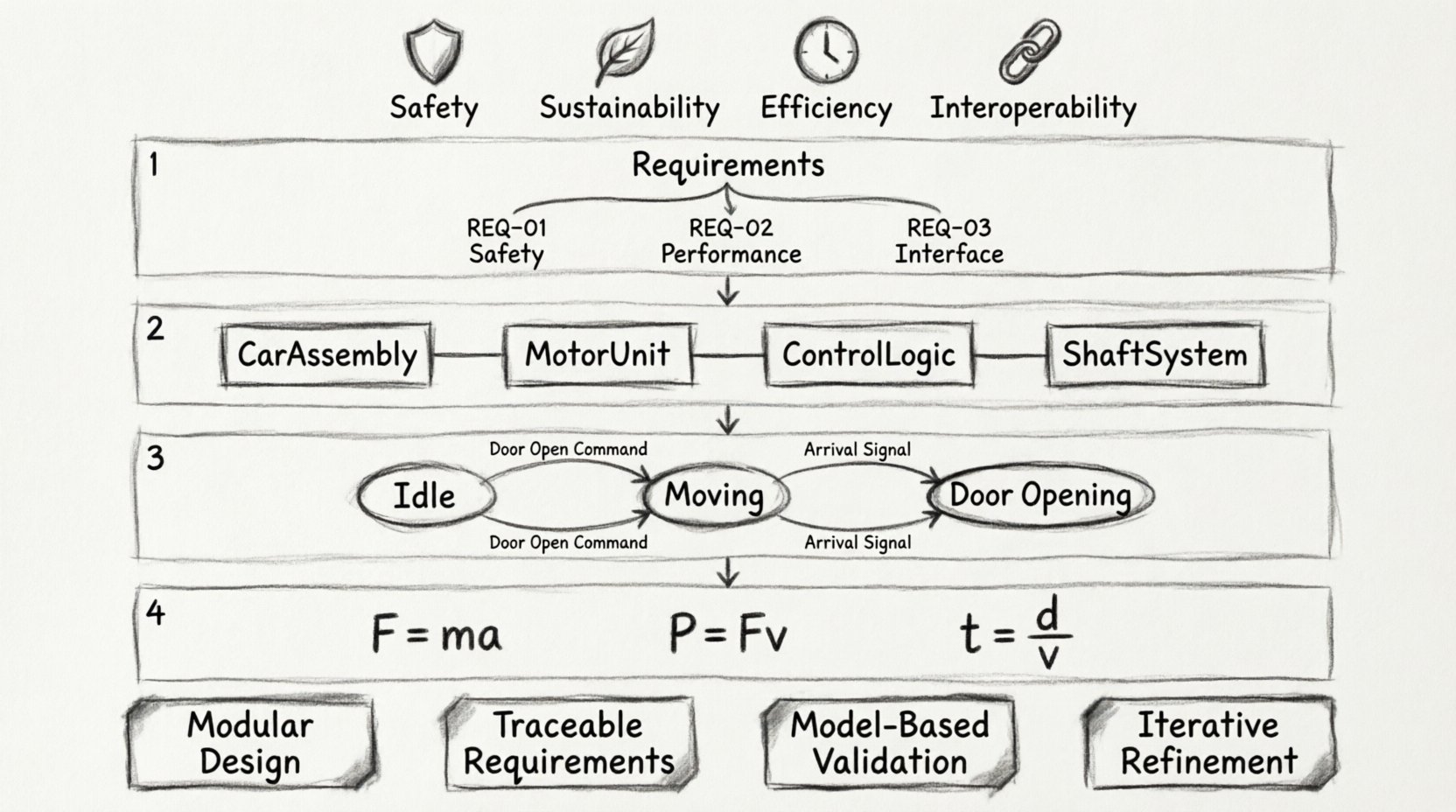
- REQ-01:安全
- REQ-01.1:ドアが障害物に接触した場合、システムは停止しなければならない。
- REQ-01.2:モーターが過熱した場合、システムは警報を発しなければならない。
- REQ-02:性能
- REQ-02.1:最大速度は秒速2メートルを超えてはならない。
- REQ-02.2:ドア閉鎖時間は3秒から5秒の間でなければならない。
- REQ-03:インターフェース
- REQ-03.1:コントローラーは、500ミリ秒ごとにステータス更新を送信しなければならない。
各要件には一意の識別子が付与された。この識別子は後に検証活動とリンクされた。エンジニアは「精査(Refine)」関係を使用して、高レベルの要件を具体的な設計要素と結びつけた。これにより、安全検査官が監査可能なトレーサビリティマトリクスが作成された。
🧱 フェーズ2:構造モデリング
要件が確立された後、焦点は構造に移った。内部ブロック図(IBD)は、エレベーターシステムの物理的構成を可視化する主なツールであった。従来のフローチャートとは異なり、IBDは部品が接続子やポートを通じてどのように相互作用するかを示す。
モデルは主要なサブシステムに分割された。このモジュール性により、エンジニアはモーター制御ロジック全体をメモリに読み込むことなく、ドア機構の開発に集中できた。
🏗️ システム構成
| ブロック名 | 説明 | 主要インターフェース |
|---|---|---|
| 車両アセンブリ | キャビン構造と内部制御装置 | ドアインターフェース、重量センサー |
| モータユニット | 油圧ポンプおよびピストンアセンブリ | 圧力制御、電源 |
| 制御論理 | ソフトウェアおよびハードウェアコントローラ | ボタン入力、安全センサー |
| シャフトシステム | 物理的なガイドレールおよびハウジング | 機械的固定、換気 |
各ブロックには、そのデータを定義するプロパティが割り当てられました。たとえば、モータユニットブロックには、圧力および温度これらのプロパティは、モデル全体で一貫性を確保するために型付けされました。型が圧力とされているプロパティは、常にPSIまたはBarの単位を保持し、後続の単位変換エラーを防ぎます。
コネクタは、これらのブロック間の情報および電力の流れを定義するために使用されました。エンジニアは、2種類のコネクタを特定しました:
- フロー接続子:物理的なエネルギー(油圧流体や電気など)の伝達に使用されます。
- リファレンス接続子:論理的なリンク(ボタンが押されたことを示す信号など)に使用されます。
この区別はシミュレーションにおいて極めて重要でした。シミュレーションエンジンは、どの接続が物理モデル化を必要とし、どの接続が論理評価を必要とするかを把握する必要がありました。IBD内でこれらのフローを分離することで、エンジニアはモデルのパフォーマンスを維持できることを確実にしました。
⚙️ フェーズ3:行動モデル化
構造はシステムが何で構成されているかを教えてくれるが、動作はそれが何をするかを教えてくれる。エレベーターシステムは外部入力に基づいて変化する複雑な状態を持つ。車両のライフサイクルを表すために、状態機械図が選択された。
🔄 状態機械論理
状態機械は、次のようないくつかの明確な状態を定義した。停止中, 移動中, ドア開閉中、およびドア閉鎖中。これらの状態間の遷移はイベントによって引き起こされた。たとえば、停止中から移動中への遷移には、イベントボタン押下と条件ドア閉鎖中.
ドア開閉中ドア開閉中状態では、アクティビティが発生した。エンジニアはこの状態内の手順を詳細に示すためにアクティビティ図を使用した。これにより、次の順序が明確に把握できた。
- 開く信号を受信する。
- 障害物を確認する。
- モーターを起動する。
- リミットスイッチの待機。
- モーターを停止する。
シーケンス図も使用され、ControlLogicとSafetySensorの相互作用を検証した。これによりメッセージのタイミングが可視化された。ドアが安全ビームが完全に作動する前に閉じる可能性のある競合状態が明らかになった。
📉 シーケンス相互作用
- ユーザーが階層ボタンを押す。
- コントローラーがモーターを起動する。
- 車両が床に到達する。
- 車両が停止する。
- コントローラーが安全ビームを確認する。
- クリアであれば、ドアを開ける信号を出す。
- 遮断されている場合、ドアを閉じたままにする信号を出す。
この詳細さが、エンジニアが初期段階でエッジケースを特定するのを助けた。シーケンス図がなければ、センサーとコントローラーの相互作用が即時であると仮定される可能性があり、実際の物理的ハードウェアではそうなることはめったにない。
📐 フェーズ4:パラメトリックモデリング
SysMLの最も強力な機能の一つは、パラメトリック図を用いて制約や計算をモデリングできる点である。これはエレベーター系の物理的限界を検証するために不可欠だった。エンジニアは、モーターが所定の時間枠内で最大荷重を揚上できるかどうかを確認する必要があった。
物理法則に対して制約ブロックが定義された。ニュートン運動の制約ブロックが作成され、力、質量、加速度に関する方程式が含まれていた。これらの式は、構造モデル内のプロパティにリンクされた。
🧮 制約関係
- 力 = 質量 × 加速度
- 力 = 力 × 速度
- 時間 = 距離 / 速度
これらの式をモデルのプロパティにリンクすることで、エンジニアはシミュレーションを実行し、システムが性能要件を満たしているかを検証できた。計算された力がモーターの容量を超える場合、モデルは違反を示した。これはモデルベース検証の一形態である。
このアプローチにより、初期段階での物理的プロトタイプの必要性が削減された。エンジニアはモデル上で車両の質量やモーターの出力を調整し、必要な時間への影響を即座に確認できた。この反復プロセスにより、大幅な時間とリソースの節約が実現した。
🚧 遭遇した課題
複雑なシステムをモデリングすることは、困難を伴わないわけではない。若手エンジニアはこのプロジェクト中にいくつかの障壁に直面した。これらの課題に対処することは、最終モデルの成功と同等に重要である。
🔍 追跡性管理
モデルが拡大するにつれて、要件とモデル要素とのリンクを維持することが難しかった。要件が変更される可能性があり、構造、振る舞い、パラメトリクスの更新が必要になる。これらのリンクを適切に管理しなければ、モデルは一貫性を失う。
これを解決するために、エンジニアは厳格な命名規則を採用した。すべてのモデル要素は、親となる要件を反映するように命名された。要件が更新されると、名前の変更がすべての関連要素の再レビューを引き起こした。この規律により、孤立した要件を防ぐことができた。
🧩 モデルの複雑さ
より多くのサブシステムが追加されるにつれて、図はごちゃごちゃになった。50の接続を持つ内部ブロック図を読むのは難しかった。エンジニアはビューを使用してこの問題に対処した。ビューとは、特定の図に表示されるモデルの部分集合である。
- 機械的ビュー:物理的な接続のみを表示する。
- 電気的ビュー:信号の流れのみを表示する。
- 論理的ビュー: コントロール論理のみを表示します。
この分離により、ドキュメントが異なるステークホルダーにとって読みやすくなりました。機械チームは、電気信号に気を取られることなく、機械的ビューに集中できました。
🔄 バージョン管理
モデルへの変更管理は大きな課題でした。従来のバージョン管理システムはテキストには適していますが、モデリングツールはしばしばデータをバイナリ形式で保存します。これにより、バージョン間で何が変更されたかを正確に把握することが難しくなりました。
エンジニアは、モデルのすべての変更に対して手動レビューのプロセスを導入しました。変更ログはモデルと共に維持されました。すべての変更は、変更の理由と責任者を記録して記録されました。この監査トレースは、安全認証にとって不可欠でした。
💡 経験から得た教訓とベストプラクティス
エレベーターシステムのモデルを完成させた後、他のシステムエンジニアが活用できるいくつかの洞察が浮かび上がりました。
🌟 小さなステップから始める
一度に全体のシステムをモデル化しようとしないでください。コア要件とシンプルな構造から始め、段階的にモデルを拡張してください。このアプローチにより、プロセスの初期段階でモデルが管理不能になるのを防げます。
🌟 標準を早期に定義する
開始する前に、命名規則とモデリング標準を確立してください。ポートの命名方法、パッケージの構造、要件のリンク方法を決定しましょう。一貫性が、長期にわたって大きなモデルを維持する鍵です。
🌟 何度も検証する
プロジェクトの終わりまで設計の検証を待ってはいけません。各フェーズでシミュレーションやチェックを実行してください。パラメトリックモデルで違反が示されたら、すぐに設計を修正してください。エラーを早期に発見することで、再作業コストを大幅に削減できます。
🌟 意味に注目する
モデルが形状だけでなく意味を伝えることを確認してください。図は単に複雑に見えるのではなく、システムを説明すべきです。すべての接続やブロックの意図を明確にするために、ラベルや説明を使用してください。モデルは単なる設計資料ではなく、コミュニケーションツールです。
📊 モデリング要素の要約
この事例研究で使用した技術的要素を振り返るために、以下の表は図の種類とその具体的な用途を要約しています。
| 図の種類 | 主な用途 | 主な利点 |
|---|---|---|
| 要件図 | 要件と設計のリンク | トレーサビリティを確保する |
| 内部ブロック図 | 物理的構成 | インターフェースを可視化する |
| 状態機械図 | 運用状態 | ライフサイクルを明確にする |
| シーケンス図 | タイミングと相互作用 | ラスコンディションを特定する |
| パラメトリック図 | 計算と制約 | 物理的限界を検証する |
各図の種類はそれぞれ異なる目的を果たしていた。それらを単独で使用していたら、システムに対する断片的な理解に終わっていただろう。それらを統合することで、エレベーターシステムの包括的な表現が作成された。
🏁 システムモデリングに関する最終的な考察
この事例研究は、SysMLが複雑なシステム工学に実用的なツールであることを示している。理論的な演習にとどまらず、リスクを低減し、コミュニケーションを向上させる手法である。若手エンジニアは標準的な手法を遵守し、要件、構造、挙動の関係に注目することで、重要なシステムを成功裏にモデル化した。
エレベーターシステムのモデルは今や動的なアーティファクトとなっている。プロジェクトが設計から実装へと移行する中で、モデルは真実の根拠となる。物理的なハードウェアの変更はモデルに反映され、モデルの変更は要件に基づいて検証される。
類似の手法を採用しようとする他のエンジニアのために、道は明確である。まず要件から始める。構造を構築する。挙動を定義する。制約を検証する。トレーサビリティを維持する。この厳格なアプローチに従うことで、複雑さを管理し、安全で、効率的で、信頼性の高いシステムを提供できる。

